2020 – WEEK 2, testen, testen, testen
Team Rembrandts begon week # 2 met een algemene vergadering met een update voor elk subsysteem. De concepten doorlopen die als prototypes zijn gebouwd en algemene beslissingen nemen over de manier waarop we willen gaan. Verder worden veel experimenten en testen gedaan zoals voor de opslag-, shiet-unit en vele andere subsystemen
Opslag Update

Ze vinden de spinning hopper er goed en zijn begonnen met de CAD uitwerking. Verder probeerde ze de unit te verkleinen tot 24-25 “OD en onderzocht ze hoe de wielen aangedreven konden worden en hoed de rotatie-unit draaide.
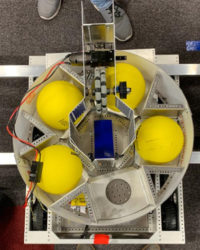
Omdat ze zich realiseren dat er inbouwproblemen kunnen ontstaan, hebben ze gewerkt aan een hopper in een andere stijl. Geïnspireerd op de Week 6 Insanity Ri3D-robot. (Zie afbeelding boven) In principe is het een wiel/omni dat ronddraait in een boog met wat ballen. We hebben nog geen goede video ervan!
Shooter Update
Team Rembrandts bouwde eerst een “tweewielen” schieter-prototype.
Zoals een beetje verwacht, zie je in de video’s: de bal kromt veel. Hoewel de consistentie van de aanvoer in onderstaande video slecht is, zal de variatie in wielsnelheid, bal-compressie en de o.a. geleiding het moeilijk maken om consistente shots te krijgen.
Ze veranderden de tweewielen-schiet unit in een “shooter” met een kap.
Lopend met 1 NEO op 1: 1 kettingaandrijving.
Dubbele 4 “x2” fairlane wielen met dubbele x 4 “x2” colsons als massa.
NEO werkt op 100% vermogen en heeft geen regelkring. Het Softwareteam werkt aan de slimme snelheidsregelkring op de NEO/Spark Max. Hopelijk kunnen later nog meer testen laten zien.
Sideview video:
Slowmo video door de binnenste poort:
De powercell moest tegen een NEO worden geduwd (ontwerpfout), vandaar dat het eerste en laatste schot een beetje afwijken.
Ze proberen de schier unit later nog te verfijnen.
Ze voegen nog 1 NEO + slimme snelheid toe. Doel: 5 powercells binnen 1 seconde> 5/5 binnenpoort!
 Andere Subsystemen
Andere Subsystemen
 Andere Subsystemen
Andere SubsystemenOver alle andere subsystemen wordt deze week door de diverse groepen verder gebrainstormd.
- Intake
- Kijkend naar een combinatie van de intake van team #125 – 2017 en Everybot 2020. Ontwerpen is begonnen en tegen het einde van de week zal er al gebouwd worden.
- Control Panel
- Er wordt gewerkt aan de kleursensor en waarschijnlijk aan een wiel om hem te laten draaien. Later wordt beslist wanneer de algemene opbouw van de robot duidelijk is.
- Climbing
- Het eerste proto type wordt verfijnd om het mogelijk te maken onder een hoek van 14,5° te rijden. Daarnaast is gekeken naar de opbouw en implementatie van een lineaire arm.
Volg de voortgang van team Rembrandts op de Delphi 4481-team-rembrandts pagina.