2020 – WEEK 4, 4 gehad… 0 te gaan!
Nou, dat ging niet echt zoals gepland. Het belangrijkste doel was om tegen het einde van week 4 een complete robot in gebruik te hebben.
Week 3 en 4 waren een beetje chaotisch. We hebben nog nooit zo’n geweldige, enthousiaste groep teamleden gehad die allemaal hard willen werken en bijdragen aan het bouwseizoen (Meestal was het rond de 20 en dit jaar hebben we 35-50 op een teamavond).
Hierdoor was het een uitdaging om iedereen aan boord en de neuzen in dezelfde richting te houden. Bijvoorbeeld; mensen kwamen de werkplaats binnen, begonnen met een paar leden aan een prototype te werken, stuurden een paar video’s op Slack en vertrokken vervolgens (daarbij beslissingen nemend die bijvoorbeeld op software van invloed zijn maar hierover niets vertellen).
Dus voor de komende weken beginnen we elke teamavond met een snelle status bijeenkomst: elke sub-team leider moet een korte update geven. En na elke teamavond moet een korte samenvatting worden gegeven op Slack om alle andere sub-teams over de huidige voortgang te informeren.
Voordat we officieel beginnen met actuele updates … eerst dit:
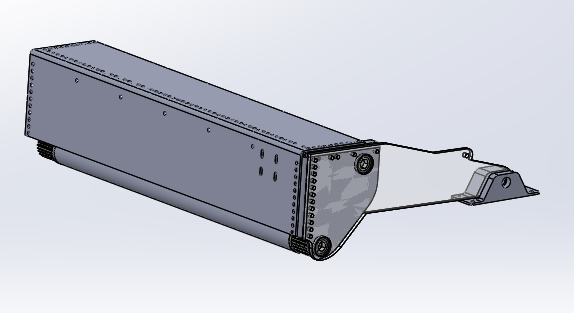
Plezier (per ongeluk) met plaatwerk:

Shooter Update

Om het powercell-pad van het opslagwiel in de “kickerdrum” en het schietwiel te testen, hebben we een nieuwe prototype-revisie ontworpen. Deze had geen extern vliegwiel; we konden massa toevoegen aan de schiet-as.
Schoten waren een beetje inconsistent omdat het binnen in iets te breed was. Ik denk dat er een vrije ruimte van ongeveer 5 mm was aan de binnenzijde. Door het toevoegen van karton om het een beetje beter te laten aansluiten op de powercell, kon de powercell beter worden gecentreerd.
Ons eerdere prototype had een platte kap en deze schoot met 2 bogen. We vonden dat schietspel met een platte kap betrouwbaarder was dan de bogen. Dus voor het verbeterde ontwerp gingen we terug naar de platte kap en de ingesloten zijkanten aan de uitgang.
Climber Update
We hebben besloten dat het rijden op de klimsport waarschijnlijk niet nodig is voor week 1, maar we wilden doorgaan met het voltooien van het huidige proto.
Bewegende klimmer horizontaal
Bewegende klimmer onder een hoek
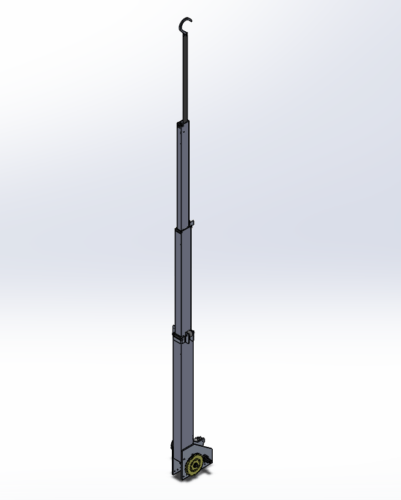
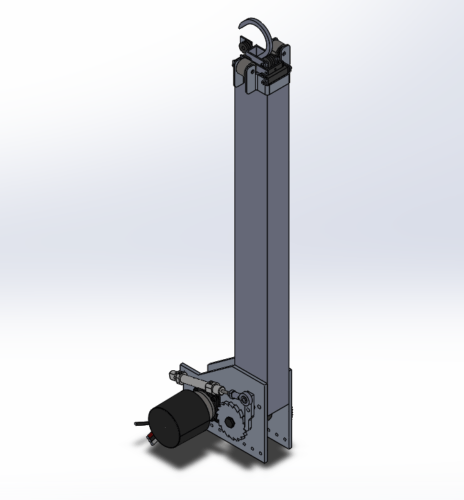
De klimmer blijft voorlopig bij de 3-traps lineaire buizen met constante krachtveren.
3D SOLIDWORKS UPDATE
Het CAD-team heeft goede vorderingen gemaakt na een lange uitgebreide CADathon! Het belangrijkste doel was om de laatste aandrijving en opslag voor zondagavond en de andere subsystemen voor 90% te laten uitvoeren.
Op die manier kunnen de aandrijflijn en opslag op maandag, dinsdag worden vervaardigd en op woensdag beginnen met de montage. Vervolgens hadden de andere subsystemen tot woensdagavond de tijd om ervoor te zorgen dat alle subsystemen goed samenwerken in CAD en klaar zijn voor productie. We versturen de onderdelen op woensdagavond zodat we op vrijdag kunnen beginnen met de assemblage en hopelijk op zaterdagmiddag een robot in gebruik hebben.
Specificaties voor de subsystemen zijn niet veel veranderd tussen deze update en de laatste update. Dus hier zijn slechts enkele screenshots van de huidige status.
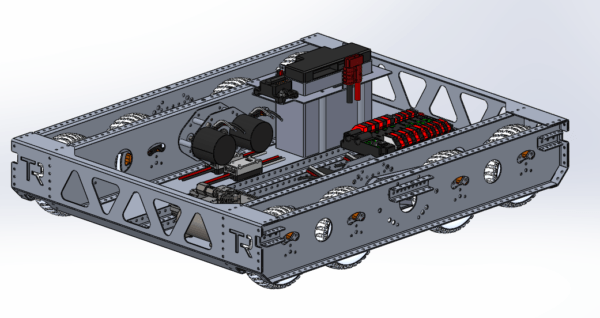
Drivetrain
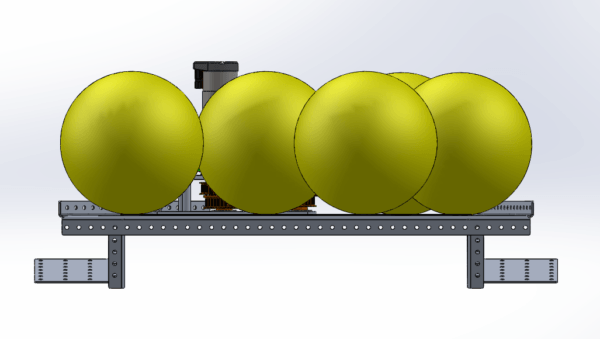
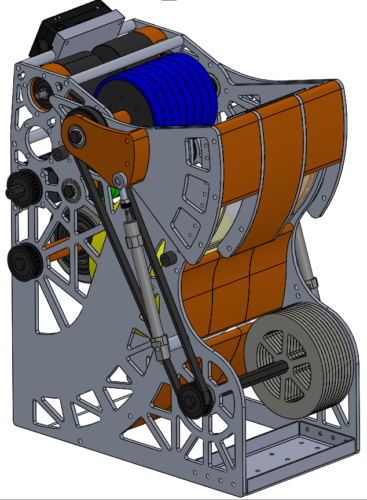
Opslag
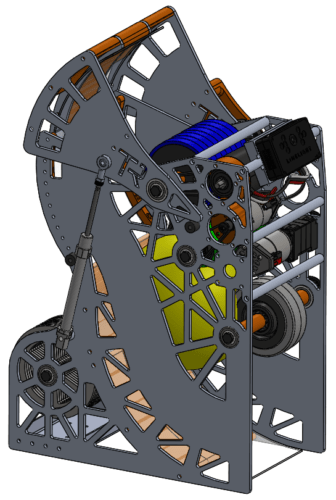
Klimmer
Intake
(Ze hebben even moeten wachten tot de opslag klaar is, dus ze zijn nog niet zo ver. Uiteindelijk wordt het iets minder groot  )
)
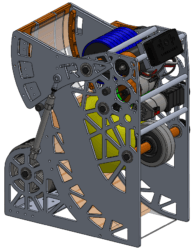
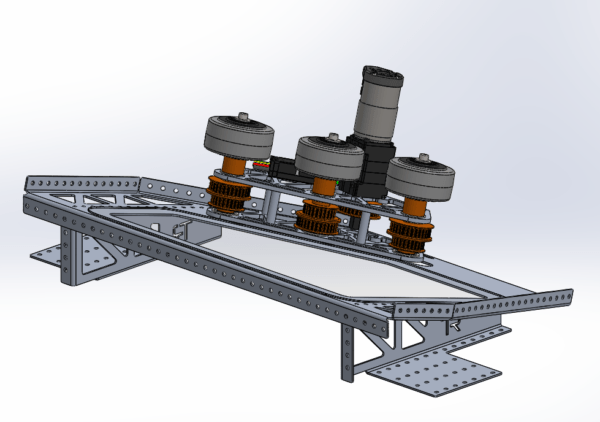
Schieter
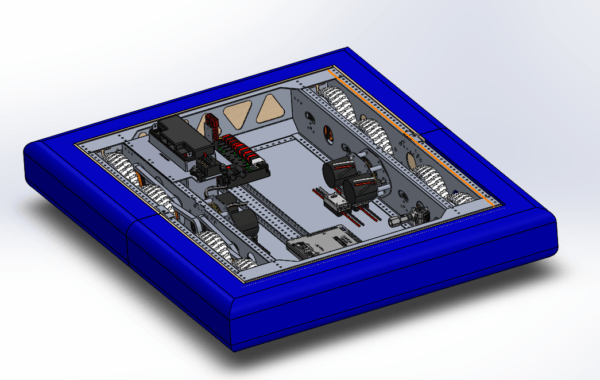
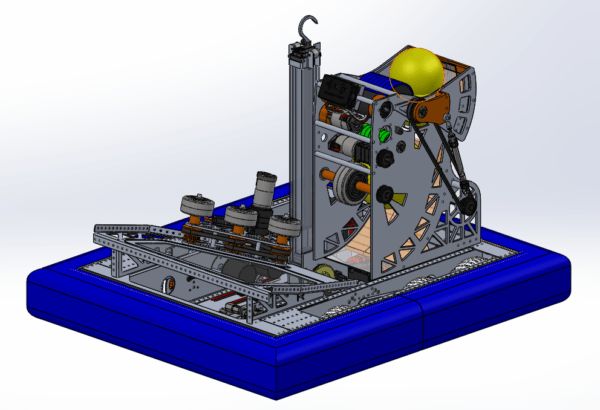
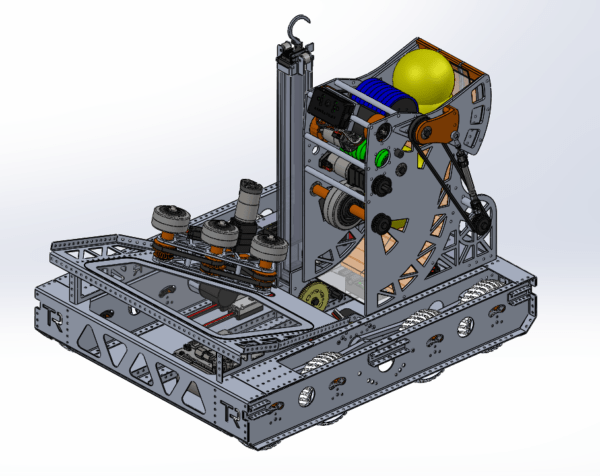
Complete assemblage (hier ontbrekend het bedieningspaneel, opslagwanden en inname nog)
WEEK 5 PLAN
Maandag & dinsdag = Productie DT en opslag + Definieer CAD van andere subsystemen
Woensdag = Assemblage DT en Opslag + Finale subsystemen controleren en productie starten
Donderdag = productie van de subsystemen
Vrijdag en zaterdag = Monteer 1 complete robot en DT + opslag voor onze tweede robot. Begin met het testen van de complete robotcyclus en rond rijden.…