2020 – WEEK 3, Wheel of Doom of Wheel of Death?
Team Rembrandts is druk bezig met het verder ontwikkelen en testen van de robot voor de FIRST-competitie 2020: Rise, the force is building. Intussen zitten we al in de derde week en beginnen de dead-lines dichterbij te komen. Op 13-02-2020 is de VIP reveal, dan moet de robot er staan. Al snel daarna moet de robot klaar zijn voor verzending naar de USA.
Hier volgt een korte impressie van de voortgang zoals deze te lezen is op de blog site van seizoen 2020.
WoD – Wheel of Doom of Wheel of Death?
Maandag tijdens de teamavond hebben we het WoD-concept nog een laatste poging gegeven om te slagen, als we niet tevreden waren over de prestaties zouden we doorgaan naar het andere concept.
Anti Jam Code – 1 Powercell
Anti Jam Code – 5 Powercells
No Pockets + Omni
No Pockets + Brush
No Pockets + “Spinning” Omni
WoD-beslissingstijd:
- Werkt het? – Yeah-een-soort-van
- Vinden we prestatie goed? – Het dumpen van 5 powercells kan lastig zijn, maar het opnemen van een reeks powercells is mogelijk
- Is het snel genoeg? – In de volledige veldcyclus, ja waarschijnlijk. In de opruim rol/schieten en sluiten, waarschijnlijk nog niet
- Hebben we al een shooter die 5 ballen in ~ 0,5 seconde aankan? – Nee, niet echt…
- Hebben we er alle vertrouwen in dat we nu de laatste iteratie kunnen ontwerpen om binnen een week vanaf nu een werkende robot te hebben? – Waarschijnlijk niet
- Welke andere subsystemen zijn afhankelijk van de WoD? – Intake & klimmen; powercell die over de bumper intrekt versus deze hoger te tillen om te rollen/dumpen/vallen in de WoD en een schutter plaatsen & klimmen in het midden van de WoD zal moeilijk te in te bouwen zijn. Shooter en Control Panel zijn triviaal op een manier dat het Control Panel-systeem ergens in beide concepten kan worden geïntegreerd. En de shooter heeft een montagepunt waar een powercell zal binnenkomen, zodat deze op beide concepten moet kunnen passen.
Besluit:
De WoD heeft veel aandacht en interesse binnen het team. We vinden het concept goed, maar we hebben niet het gevoel dat we al voldoende presteren om het voor week 1 te gebruiken. Omdat alle andere subsystemen zo afhankelijk zijn van de WoD hebben we besloten om te kiezen voor een “veiligere/gemakkelijkere” conceptroute waardoor het team aan subsystemen kan blijven werken.De uitwerking van de WoD wordt voortgezet door een aantal studenten en mentoren. We willen het graag op een bepaald moment klaar hebben zodat het snel genoeg is en we er blij mee zijn. Misschien komt het op onze robot voor het wereldkampioenschap Detroit

 Huidige Robot Ontwerpstrategie
Huidige Robot Ontwerpstrategie
 Huidige Robot Ontwerpstrategie
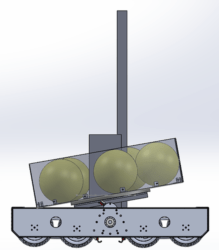
Huidige Robot OntwerpstrategieWe gaan door met het onderstaande concept:
- Pivoting intake – #254 2017 style:
2 x 775pro 4:1, 2x 40mm (~1.6") OD dead axle rollers. - Storage – #6135 2020 style:
3 x 3" wheels. Swappable between colson or compliant wheels to test. Wheels will have different ratios to make sure the wheel closest to the shooter hole will spin faster than the outer wheels. Storage slope of 15 degrees and 4" wheel to suck the powercell through the hole into the shooter - Shooter:
Offset to the right of the robot. 2" OD AM Stealth 4" wide kicker drum > individually powered by a 775pro. Shooter drum will be 4" OD, fairlanes or AM Stealth wheels and a external flywheel eventually powered by 2 NEO's 1:1. 2 position hood with ~15 degree angle and ~60 degree angle > Wall shot and longer shots with varying RPM - Climber:
Centered in the middle of the robot. 2 or 3 stage linear tube. Testing this weekend with 2 stage, string and spring/tubing concept. Similar as the #118 Everybot 2020. Eventually package it into a 3 stage arm with constant force springs winched through a custom neo gearbox and a ~ 25mm/1" drum. - Control Panel:
Pivoting wheel which allows to be tucked down to driver through the trench. Rev color sensor from below
Andere beslissingen::
- Als rijden onder de geul de klimmogelijkheden en inbouw schaadt, mag de geulhoogte voor week 1 over worden geslagen. Alle andere subsystemen moeten ontworpen zijn om onder de geul te kunnen rijden.
- Overschakelen van 6 NEO-aandrijving naar 4 Neo-aandrijving. Met de compressor en Limelight aangesloten op de PDP waren we heel dichtbij op PDP-slots. 4 Neo’s zullen veel kracht hebben en ons de mogelijkheid geven om bijvoorbeeld een extra kicker-motor toe te voegen.
Dat is het eigenlijk in een notendop.
Het team heeft hard gewerkt om de hele robot in een paar dagen in CAD te maken. Hopelijk hebben we dit weekend de beschikking over onze prototypes en een verbeterde geïntegreerde versie van de hierboven afgebeelde versie.
We zullen screenshots van de CAD posten zodra deze klaar zijn. 
Volg de verrichtingen van team Rembrandts op hun blog…