Mechatronica opleiding kiest vertragingskast Apex Dynamics voor delta robot
 Hoe leer je studenten om een x,z robot met lopende band te besturen én bouwen? De Haagse Hogeschool heeft in het eerste en tweede jaar een practicum waarin de delta robot centraal staat. Het eerste jaar leren ze besturen, het tweede jaar gaan ze bouwen. Apex Dynamics is trots dat wij de vertragingskasten mochten leveren die samen met de Siemens motoren voor de aandrijving zorgen. In dit artikel vertellen we meer over de opdracht, delta robots en onze vertragingskast.
Hoe leer je studenten om een x,z robot met lopende band te besturen én bouwen? De Haagse Hogeschool heeft in het eerste en tweede jaar een practicum waarin de delta robot centraal staat. Het eerste jaar leren ze besturen, het tweede jaar gaan ze bouwen. Apex Dynamics is trots dat wij de vertragingskasten mochten leveren die samen met de Siemens motoren voor de aandrijving zorgen. In dit artikel vertellen we meer over de opdracht, delta robots en onze vertragingskast.
De Haagse Hogeschool nodigt iedereen uit om samen de wereld te veranderen en verbeteren, door studenten, docenten en partners te ontwikkelen tot wereldburgers. Deze wereldburgers denken grenzeloos, staan stevig in hun schoenen en benaderen de wereld met eigen overtuiging. De school benadrukt het belang van samenwerking, creativiteit en vakkundige inzet voor het ontwikkelen van oplossingen. Ze biedt een veilige en betrokken omgeving voor ontwikkeling en vernieuwing, ondersteund door waarden als nieuwsgierigheid, zorgzaamheid en verbinding. Dit komt tot uiting in hun diverse studentenpopulatie, actuele curricula, onderzoeksthema’s en internationale samenwerkingen.
Delta robots in Mechatronica opleiding
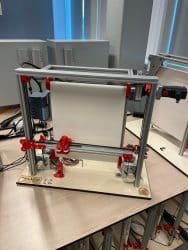
 Bij de opleiding Mechatronica krijgen de studenten in hun eerste jaar een practicum waarin ze leren om een x,z-robot met lopende band te besturen. Deze robot, ook wel Single-belt of H-brug robot genoemd, is een 2-assig portaalrobot bestaande uit een dubbele geleiding in het horizontale X-vlak en een verticale Z-as. De riem is vast en gespannen aan het lastuiteinde. Het geheel wordt aangedreven door een roterende riem, die verbonden blijft door verschillende doorbuigingspunten. De beweging wordt gerealiseerd door twee motoren. De coördinaat ligt diagonaal op de afbuigpunten van de X-as en de Z-as. Met dit systeem kun je kleine massa’s bewegen en daardoor is het mogelijk hogere versnellingen te bereiken.
Bij de opleiding Mechatronica krijgen de studenten in hun eerste jaar een practicum waarin ze leren om een x,z-robot met lopende band te besturen. Deze robot, ook wel Single-belt of H-brug robot genoemd, is een 2-assig portaalrobot bestaande uit een dubbele geleiding in het horizontale X-vlak en een verticale Z-as. De riem is vast en gespannen aan het lastuiteinde. Het geheel wordt aangedreven door een roterende riem, die verbonden blijft door verschillende doorbuigingspunten. De beweging wordt gerealiseerd door twee motoren. De coördinaat ligt diagonaal op de afbuigpunten van de X-as en de Z-as. Met dit systeem kun je kleine massa’s bewegen en daardoor is het mogelijk hogere versnellingen te bereiken.
In hun tweede jaar gebruiken de studenten dezelfde apparatuur om een delta robot bouwen. De PLC moet dan zo geprogrammeerd worden dat de deltarobot tangramstukjes kan oppakken en deze in een vierkant doosje plaatst.
Wat is een delta robot
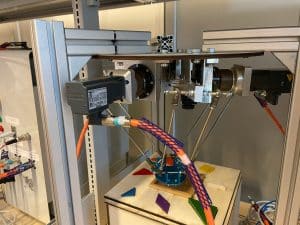
 Een delta robot is een 3-assige, parallelle robot waarbij de drie motoren aan het frame van de robot vastzitten. Aan de motoren zitten lichte armen die in de end-effector bij elkaar komen. Dit zorgt voor een lichte constructie die daardoor snelle bewegingen kan maken. Het bijzondere van de delta robot is dat de end-effector altijd horizontaal blijft staan. Vaak zie je dat de end-effector nog kan roteren om een verticale as zodat producten na oppakken geroteerd en weggelegd kunnen worden.
Een delta robot is een 3-assige, parallelle robot waarbij de drie motoren aan het frame van de robot vastzitten. Aan de motoren zitten lichte armen die in de end-effector bij elkaar komen. Dit zorgt voor een lichte constructie die daardoor snelle bewegingen kan maken. Het bijzondere van de delta robot is dat de end-effector altijd horizontaal blijft staan. Vaak zie je dat de end-effector nog kan roteren om een verticale as zodat producten na oppakken geroteerd en weggelegd kunnen worden.
De eerste delta robot werd begin jaren 80 uitgevonden ontwikkeld door Professor Raymond Clavel en zijn team bij de Ecole Polytechnique Federale de Lausanne (Zwitserland) en was bedoeld om bonbons van een lopende band met een zuignap op te pakken en in een blisterverpakking te plaatsen. Een leuk weetje: Ondanks dat het een Zwitserse uitvinding is en dat een Zweeds bedrijf deze robot op de markt gebracht heeft, zijn de grootste spelers in deze wereldmarkt Nederlandse machinebouwers.
Vertragingskast deltarobot
Apex Dynamics heeft samen met partner Siemens Nederland 36 aandrijvingen geleverd, zodat 12 delta robots gebouwd en getest kunnen worden. Wij leverden onze vertragingskast uit de PD-serie, een compacte tandwielkast met een uitgaande “robot” flens welke voor een stabiele en kiepstijve aandrijving zorgt. Door zijn lichtgewichte bouw en lage massatraagheid is dit de ideale tandwielkast voor deze toepassingen.
Dhr Ernst Kouwe en Frank Goedhart zijn de drijvende krachten achter dit initiatief. Tijdens een rondleiding in de praktijklokalen valt het op dat er zeer veel studenten bezig zijn met fanatiek bouwen en programmeren in het mechatronica praktijklokaal.
We zijn blij dat wij een kleine bijdrage mochten leveren aan een opleiding die zo belangrijk is voor de Nederlandse machinebouw. Wil je meer weten over dit project of onze producten? Neem dan contact op met Apex Dynamics.
Verdiep je in Apex Dynamics’ basisprincipes
Beheers jouw kennis van tandwielkasten, tandheugels, rondsels en smeersystemen
Doe de APEXperience