2020 – WEEK 2, testing, testing, testing
Team Rembrandts started week #2 with a general meeting with an update on every subsystem. Walking through the concepts that were build as prototypes and make general decisions on the way we want to head. Further a lot of experiments and testing is done like for the storage, shooter and many other subsystems
Storage Update

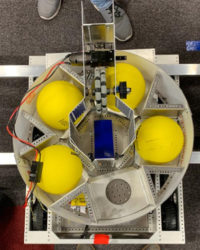
They are liking the spinning hopper and started on the CAD. Trying to narrowing it down to 24-25″ OD and looked into how to power the wheels and spinning rotation.
Since they are aware of the packaging issues that might arise we’ve been working on a different style hopper. Inspired on the Week 6 Insanity Ri3D robot. (See below) Basically a wheel/omni spinning flimsy within an arch and some balls. No good video of it yet!
Shooter Update
Team Rembrandts first build a two wheel shooter prototype.
As a little expected see a lot of other videos: the ball curves a lot. Although feed consistency is bad in this video, the variation in wheel speed, ball compression and guidance etc. will make it difficult to get consistent shots up and running.
They modified the two wheel shooter to a hooded shooter.
Running with 1 NEO on 1:1 chain driven.
Double 4″x2″ fairlane wheels with double x 4″x2″ colsons as mass.
NEO runs at 100% power and no control loop. Software team is working on the smart velocity control loop on the NEO/Spark Max. Hopefully we test more of that later.
Sideview video:
Slowmo video through inner port:
The powercell needed to be pushed against a NEO (design fault ), hence the first and last shot being a little off.
Trying to refine the shooter tomorrow night >
Add 1 more NEO + Smart velocity.
Target: 5 powercells within 1 second > 5/5 inner port!
 Other Subsystems
Other Subsystems
 Other Subsystems
Other SubsystemsAll other subsystems brainstormed about their plan for this week.
- Intake
- Looking at a combination of the #125 – 2017 intake and Everybot 2020. Designs were started to have something build by the end of the week.
- Control Panel
- Working on the color sensor and probably a wheel to spin it. Will be decided whenever general packaging of the robot is clear.
- Climbing
- Refined their first prototype to make it able to drive on an angled switch at 14.5 degrees. Besides that looked at the packaging and implementation of a linear stage arm.
Follow the proceedings on the Delphi 4481-team-rembrandts page.